
NexDroid与 ROS 结合
2021-12-29
视频
我们制作了NexDroid系统连接到ROS的视频教程。
一、初始化 ROS 操作环境
·ROS 系统的安装
包括完整的安装步骤和出现错误的解决方式。
1.设置sources.list
设置电脑以安装来自packages.ros.org的软件。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'速度过慢配置清华源镜像
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'PS:下载失败,尝试对 ubuntu 配置阿里源、清华源等。下面提供一个阿里源的配置方案。
备份源列表
Ubuntu配置的默认源并不是国内的服务器,下载更新软件都比较慢。首先备份源列表文件sources.listsudo cp /etc/apt/sources.list /etc/apt/sources.list_backup打开
sources.list文件修改sudo gedit /etc/apt/sources.list编辑/
etc/apt/sources.list文件, 在文件最前面添加阿里云镜像源:deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse刷新列表
sudo apt-get update sudo apt-get upgrade sudo apt-get install build-essential
2.设置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C6543.安装
sudo apt update
sudo apt install ros-melodic-desktop-full4.初始化rosdep
初始化失败,按照步骤 6 修改,初始化完成再去配置环境变量
sudo rosdep init
rosdep update5.设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc6.rosdeq出错
因为服务器的原因,会遇到下面的问题,需要对配置文件进行修改
sudo rosdep init
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
ERROR: error loading sources list:
('The read operation timed out')- 打开包含资源下载函数的文件:
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py添加
url="https://ghproxy.com/"+url
修改
/usr/lib/python2.7/dist-packages/rosdistro/__init__.py文件中的DEFAULT_INDEX_URLsudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.pyDEFAULT_INDEX_URL = 'https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml' 预览
预览修改其余(4 个)文件中的地址,在地址
https://raw.githubusercontent.com/前添加https://ghproxy.com/$ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py //修改第36行的地址 $ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py 72行 //修改第72行 $ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/rep3.py //修改第39行 $ sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py //修改第68行、119行解决 Hit 第五个地址的报错
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py //在第204行添加如下代码(即在该函数块下的第一行处) gbpdistro_url = "https://ghproxy.com/" + gbpdistro_url //注意,原网址中代理地址的双引号是中文,直接粘贴复制会报字符识别错误如果依然不能解决 Hit 第五个地址的报错,则修改
sudo gedit /etc/resolv.conf将原有的 nameserver 这一行注释,并添加以下两行:
nameserver 8.8.8.8 #google域名服务器 nameserver 8.8.4.4 #google域名服务器保存退出,执行
sudo apt-get update再执行
sudo rosdep init ERROR: default sources list file already exists: /etc/ros/rosdep/sources.list.d/20-default.list Please delete if you wish to re-initialize解决办法:
执行以下命令,删除已经存在的初始化文件:
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list然后再重新运行
sudo rosdep init
·ROS 功能包的安装
sudo apt-get install ros-melodic-moveit
sudo apt-get install ros-melodic-joint-state-publisher
sudo apt-get install ros-melodic-robot-state-publisher
sudo apt install ros-melodic-gazebo-ros-pkgs
sudo apt-get install ros-melodic-gazebo-ros-control
sudo apt-get install ros-melodic-joint-trajectory-controller·ROS 创建工作空间
mkdir -p ~/inexbot/src
cd ~/inexbot/src
catkin_init_workspace
cd ../
catkin_make修改~/.bashrc文件
gedit ~/.bashrc在文件末尾添加
source ~/inexbot/devel/setup.bash把所有 inexbot 的功能包复制到inexbot/src目录下
二、对moveit和机器人的进行配置
连接之前,要调整 ros 与机器人之间的各轴的转动方向、关节角度上下限值、关节转动最大的速度和加速度,使它们统一。
在示教器的设置界面上可以对机器人进行设置。
ros可以修改 xacro 文件中的各个关节角的axis和limit标签下的参数,使得模型和机器人的转动方向和转动限值相统一。修改qj_config/config/joint_limits 中的max_velocity和max_acceleration,改变 ros 模型的关节转动最大的速度和加速度。
如果转动方向、关节角度上下限值、关节转动最大的速度和加速度不统一,运行过程示教器会报角度超限和伺服警报的错误
......
type="revolute">
......joint_limits:
robot_joint1:
has_velocity_limits: true
max_velocity: 1
has_acceleration_limits: ture
max_acceleration: 1
......三、ROS 与控制器通信
以六轴机器人为例,介绍 Ros 如何与 NRC 机器人控制器连接
1.启动控制器
2.启动 Rviz 和 Gazebo 的联合仿真环境。
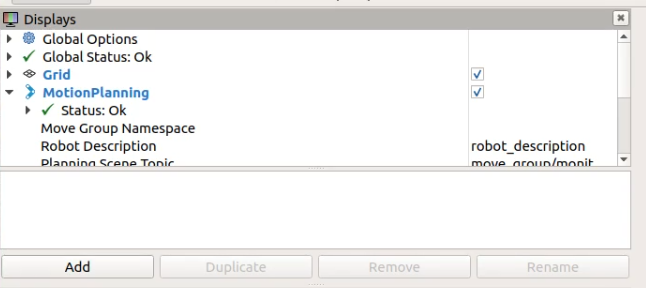
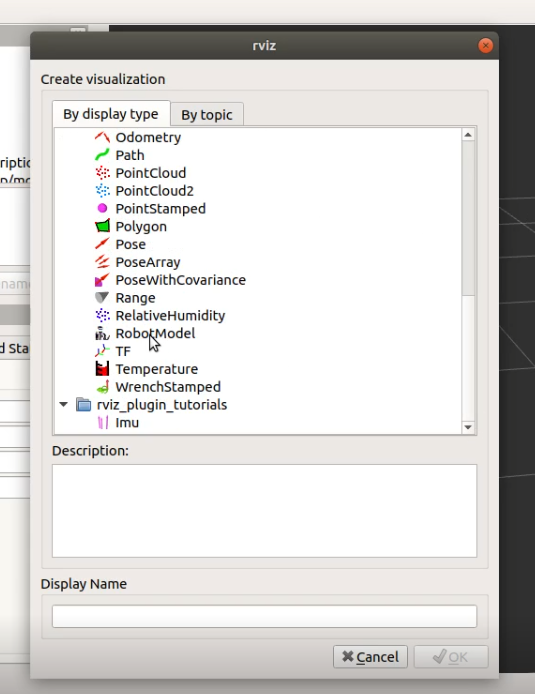
roslaunch inexbot_qj robot_bringup.launch3.添加机器人模型
点击 displays 右下角的 Add ,选择 Robot Model 添加机器人模型。
4.启动 ros node 与控制器连接
rosrun inexbot_service rostopic_joint5四、通过 moveit 控制机器人
1.设置 Goal state 控制
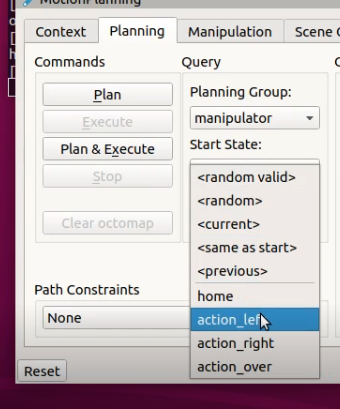
点击 plan 产生规划轨迹,底部会显示计算用时 Time。
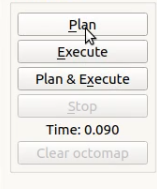
点击 execute 执行,也可以点击 plan&execute 规划完立即执行。
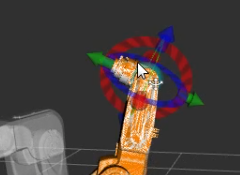
2.拖拽规划器控制
拖拽规划器前端的绿色小球,光标放在小球上时,下方出现一个三维坐标,拖拽到目标点,点击 plan 产生规划轨迹,点击 execute 执行,也可以点击 plan&execute 规划完立即执行。
五、C++编程实现对机器人的控制
1.创建 ros 功能包,存放程序文件
cd ~/inexbot/src
catkin_create_pkg inexbot_code std_msgs rospy roscpp
cd ../
catkin_make2.关节空间规划
创建moveit_joint_demo.c
将文件放置到~/inexbot/src/inexbot_code/src路径下
//moveit_joint_demo.c
#include
#include
int main(int argc, char **argv)
{
//ros的初始化
ros::init(argc, argv, "moveit_joint_demo");
ros::AsyncSpinner spinner(1);
spinner.start();
//manipulator是通过moveit设置的规划组
moveit::planning_interface::MoveGroupInterface arm("manipulator");
//容许误差
arm.setGoalJointTolerance(0.001);
//最大加速度
arm.setMaxAccelerationScalingFactor(0.2);
//最大速度
arm.setMaxVelocityScalingFactor(0.2);
// 设置goal_state,控制机械臂先回到初始化位置
//home为moveit预设的位置
arm.setNamedTarget("home");
//运行
arm.move();
sleep(1);
//设置关节空间的六个轴的角度
double targetPose[6] = {0.391410, -0.676384, -0.376217, 0.0, 1.052834, 0.454125};
std::vector joint_group_positions(6);
joint_group_positions[0] = targetPose[0];
joint_group_positions[1] = targetPose[1];
joint_group_positions[2] = targetPose[2];
joint_group_positions[3] = targetPose[3];
joint_group_positions[4] = targetPose[4];
joint_group_positions[5] = targetPose[5];
arm.setJointValueTarget(joint_group_positions);
arm.move();
sleep(1);
// 控制机械臂先回到初始化位置
arm.setNamedTarget("home");
arm.move();
sleep(1);
ros::shutdown();
return 0;
} 修改CMakeLists.txt文件
在 install 标签上面添加
add_executable(moveit_joint_demo src/moveit_joint_demo.cpp)
target_link_libraries(moveit_joint_demo ${catkin_LIBRARIES})
#############
## Install ##
#############编译代码文件
cd ~/inexbot
catkin_make运行
rosrun inexbot_code moveit_joint_demo