激光寻位以及激光跟踪是将人工手动示教焊轨迹接通过激光器识别焊缝进行焊接,相当于给机器人一双“眼睛”。
手动示教焊接过程中焊缝易受到变形、变间隙以及装配误差的影响,导致焊接过程中焊缝出现较大偏差,为了提高焊接质量需要对焊接机器人进行实时控制以对焊缝偏差进行纠偏。
激光器检测焊缝原理
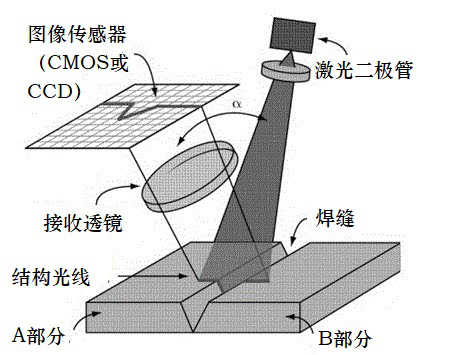
激光二极管发射激光至工件表面,经过表面反射后在 CDD 或 CMOS 传感器上形成图像,再通过与控制器之间通讯控制器处理图像位置来确定焊缝位置,从而控制机器人进行跟踪或寻位。
其实目前市场上大部分现服役的焊接机器人大部分都是以“示教再现”模式进行工作的,少数以轨迹规划方式工作。也就是说不管是什么样的产品在焊接加工的时候都需要按照设计数据进行。编好预定的理论程序然后进行焊接。如果有大批量相同的工件就需要激光寻位或跟踪来实现确定轨迹,大批量工件肯定会出现误差的情况就需要激光器来补偿误差,同时可以将焊接的合格率控制在 90%以上。
激光器标定
标定步骤有图示和文字介绍,相对来说简单上手只要能看懂上位机上的焊缝识别图即可标定。

激光寻位
可以参考以下视频